Industrial B2B Design · 2019–2020 · Universitas Indonesia
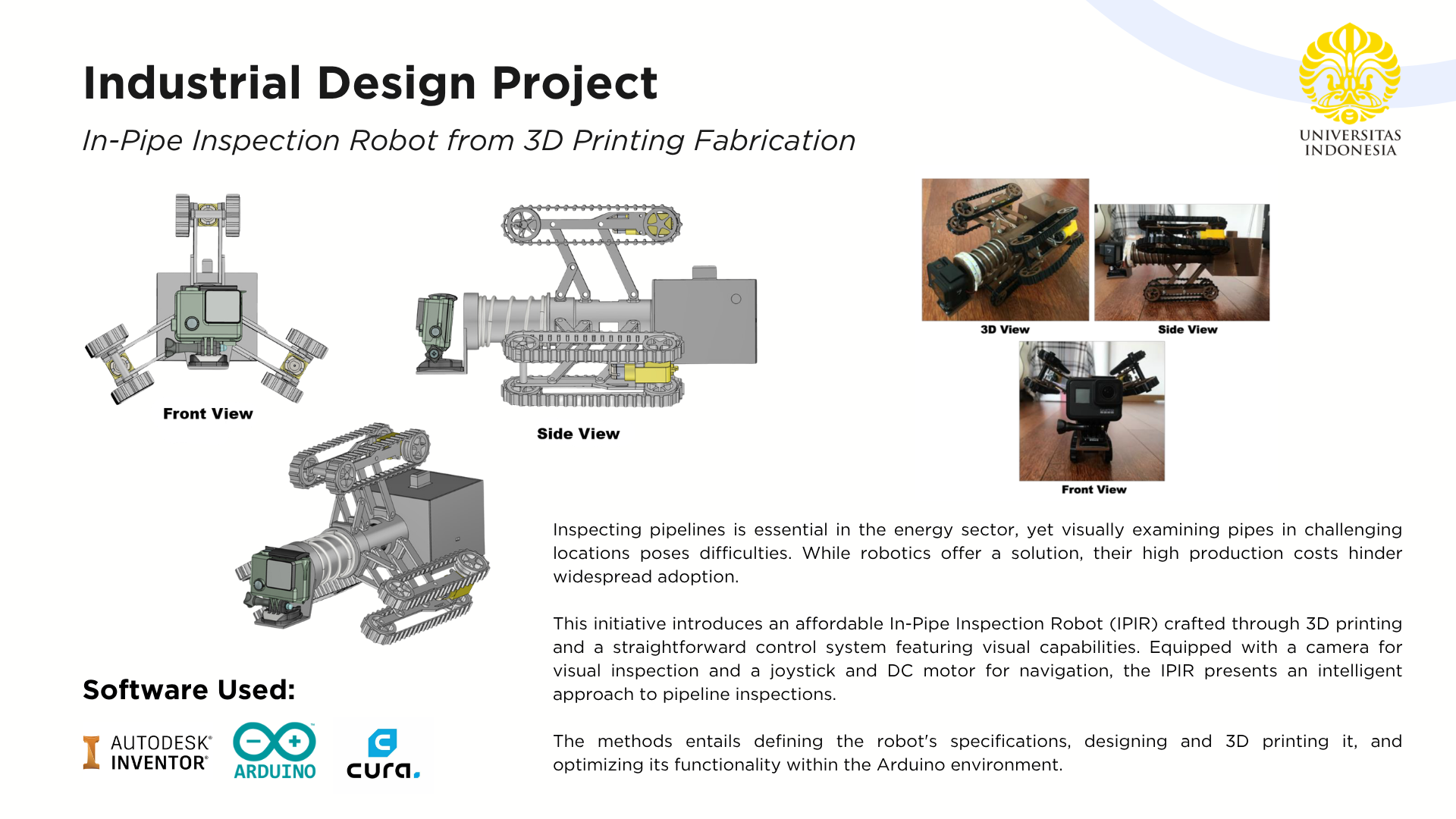
In-Pipe Inspection Robot
Making the invisible visible, affordably.
8 months
Industrial Designer & Engineer
Overview
An affordable 3D-printed in-pipe inspection robot developed in collaboration with Pertamina, Indonesia's state oil company. Published as an academic journal paper through Universitas Indonesia's Mechanical Engineering Department. The robot uses caterpillar wall-pressed locomotion, Arduino joystick control, and a GoPro Wi-Fi camera for real-time visual inspection of 6-inch pipelines.
The Problem
Pipeline inspections are critical but expensive — commercial In-Line Inspection systems cost $50,000+. Small-diameter pipes (6") are particularly inaccessible. Manual inspection is dangerous in oil and gas environments. Developing-world infrastructure teams need affordable tools designed for their operational context.
Research & Discovery
Field site visits — Pertamina oil facilities, real inspection workflow
Literature review — 3 robot type combinations (caterpillar, wheeled, screw)
Material testing — PLA+ vs ABS vs TPU for pipe environment durability
Motor torque calculations — traversing inclined pipe sections
Key Insight
“Commercial robots were over-engineered for basic visual checks. The caterpillar wall-pressed design provides grip on inclined pipes at a fraction of the cost — because every structural part is 3D-printed and individually replaceable.”
Design Process
Literature review — robot type selection (caterpillar wall-pressed chosen)
CAD modeling — Autodesk Inventor 2020, robot sized to D = 164.08mm for 6" pipe
3D printing — PLA+ structural parts (80mm/s), TPU flexible tracks (20mm/s)
Control system — Arduino Uno, L298N H-Bridge, 18650 battery pack (11.1V, 3Ah)
Camera integration — GoPro Hero 7 Black with Wi-Fi real-time feed
Field testing — 6-inch mock pipeline traversal
Critical Pivot
Caterpillar tracks slipped in horizontal pipe testing — the track rotation got stuck against the pipe wall. Without tracks, the wheeled design traversed smoothly in both directions. This revealed a manufacturing tolerance issue, not a fundamental design flaw. Documenting the failure honestly led to a clearer recommendation for the next iteration.
Results
Functional prototype built for under $500 (vs $50,000+ commercial)
Successfully traversed 6-inch diameter pipes in wheels-only mode
Real-time Wi-Fi camera feed established via GoPro mobile app
Published: 'High Customization Design of an In-Pipe Inspection Robot by using 3D Printing'
Reflection
“Design for manufacture is critical. Considering how each part would be printed and assembled from the start saved weeks of rework. And documenting what didn't work is as valuable as what did — honest failure analysis is the actual deliverable of research.”